Selon le guide, il serait judicieux de renforcer la connexion des moteurs en ajouter une couche d’epoxy. J’ai donc suivi le conseil, mais sur la première bobine, l’epoxy déborde et coule sur le rouage. C’est le drame, j’ai tant bien que mal rincé et passé des coups de dégrippant. J’éspère que je n’ai pas complétement abimé celui-ci (il semble un peu moins fluide que les autres à présent).
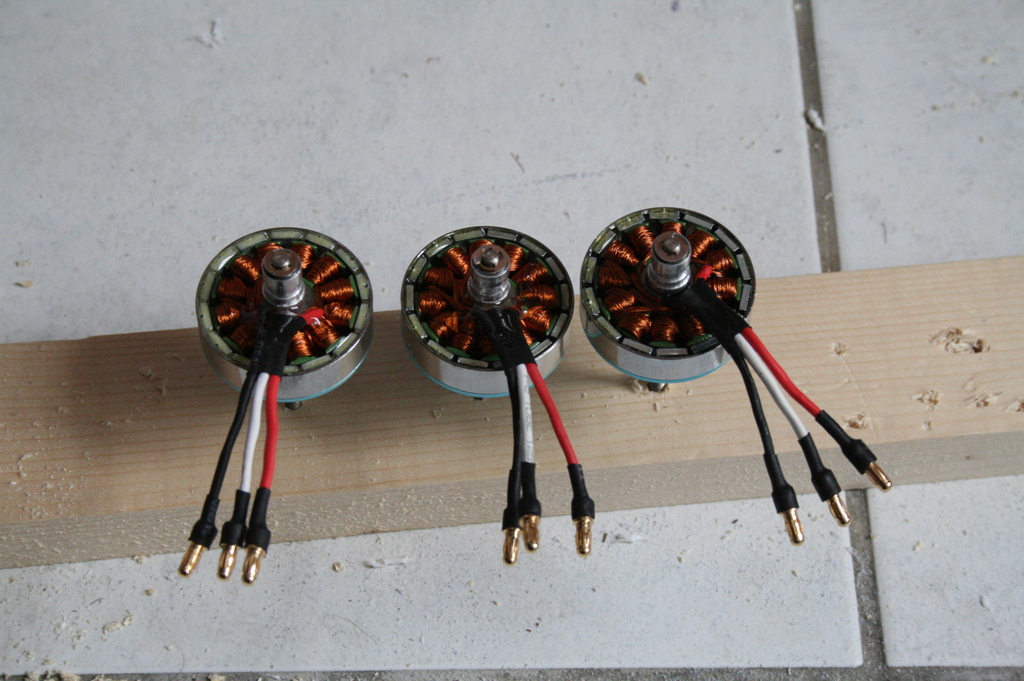
Moteurs avec epoxy en cours de séchage
Montage du socle inférieur (pour attacher la batterie et éventuellement une caméra) : j’ai utilisé du papier bulle pour limiter les vibrations (à l’origine le concepteur recommande du tube en silicone, que je n’avais pas en stock).
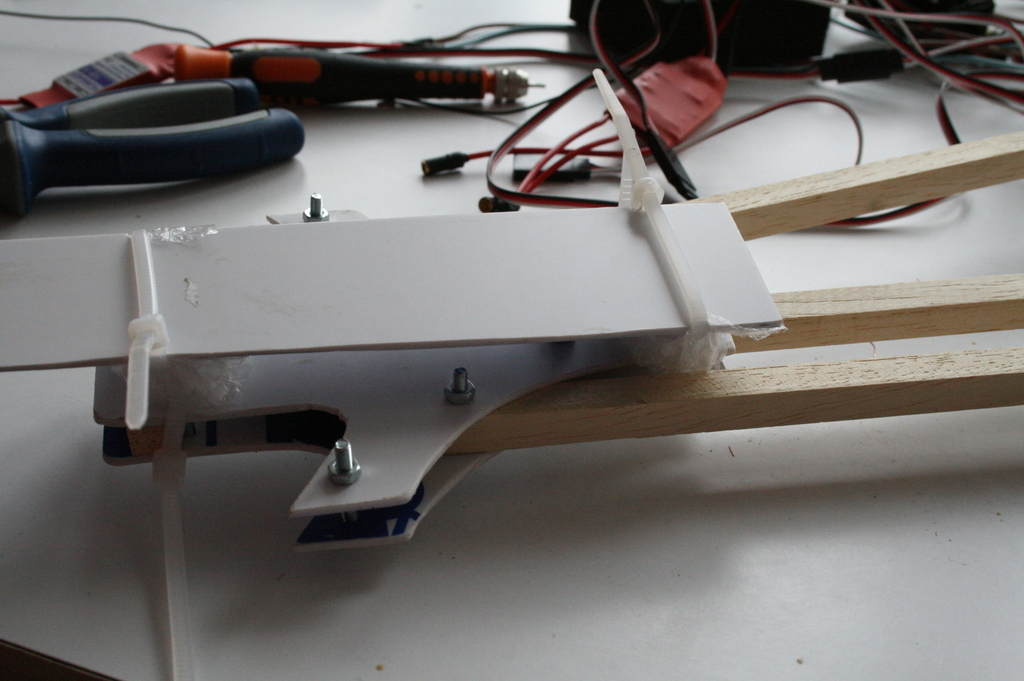
Structure pour la batterie & caméra
La pièce la plus galère (pour le moment) : la cheville pour l’hélice arrière, qui est pilotée par un servo. Après avoir acheté au prix fort une mèche de 1mm pour faire un trou pour une petite vis, je me suis rendu compte que je n’avais pas de perceuse pouvant faire tourner un truc aussi petit. En plus, la colle a foiré à deux reprises entre la partie noire et la partie blanche. Après diverses tentatives de hacks infructueuse, je suis passé à l’option : acheter des petites vis et forcer à coup de tournevis… et ca a (à peu près) marché. Disons que c’est la v1, j’ai encore des pièce pour faire une v2 si ca marche pas bien.
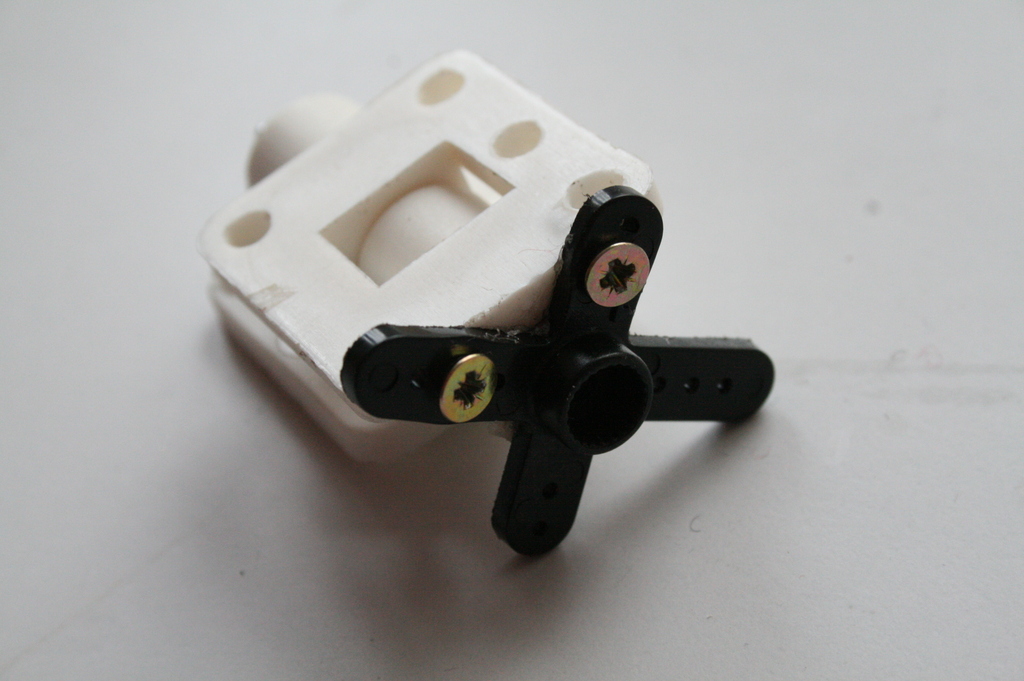
Pièce visée au forcing

Pièce attachée à l’axe arrière
Le montage de plus en plus opérationnel, on approche d’un tricopter prêt pour son premier vol (ou son premier crash).
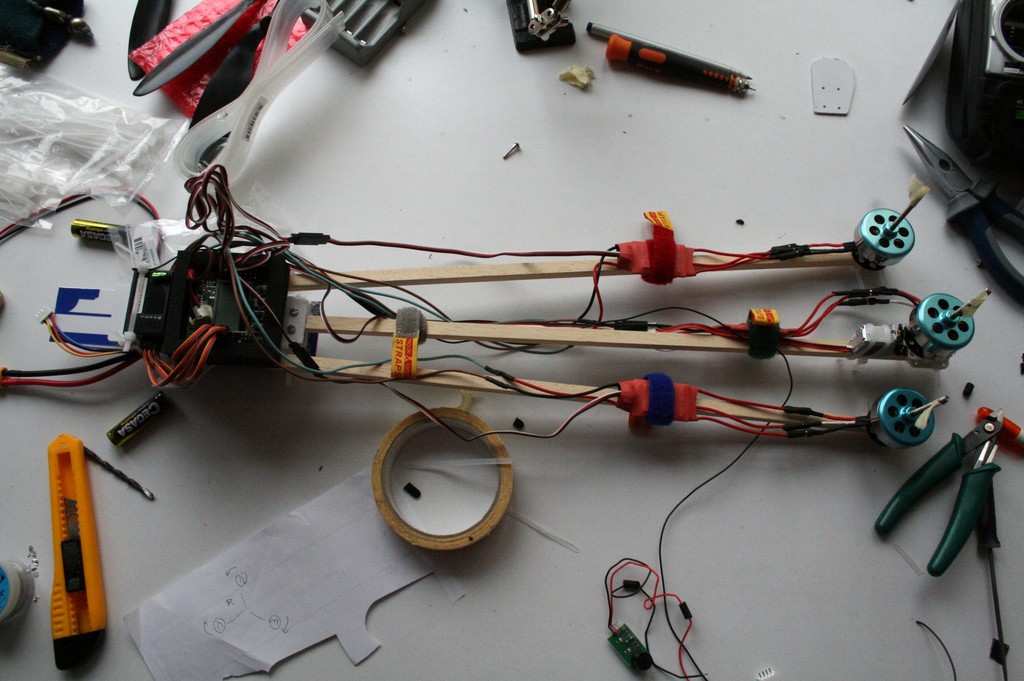
Une grosse majorité des pièces en place sur la structure
Reste à finaliser les attaches, à monter les hélices, à monter des pieds, à ajuster la configuration du micro-controlleur et tester un premier vol (sans tout casser).